
5G "On The Fly"
by Ahmed Bader, Insyab Wireless, and Mohamed-Slim Alouini, King Abdullah University of Science and Technology (KAUST)
IEEE 5G Tech Focus: Volume 1, Number 3, September 2017
Abstract
Public safety and law enforcement organizations are looking forward to harness what 5G has to offer for their mission-critical applications. The perceived challenge however is the lack of sufficient business motivation for mobile operators to roll-out 5G infrastructure where mostly needed (hard-to-reach locations and disaster-struck regions). Could there be a way to set up temporary 5G services on the fly? Indeed, there is no better way to do it than using flying base stations. But first, backhaul challenges have to be addressed. This is the core concern of this article.
1. Introduction
5G is now on the radar screen for public safety and law enforcement agencies. There is currently a strong drive by these agencies to migrate away from the mosaic of proprietary and non-mainstream technologies that we see today. One of the main drivers indeed is to benefit from economies of scale that typically characterizes any standardized cellular technology. But most importantly, they are motivated by technical reasons more than anything else.
The next generation of public safety and law enforcement applications entails the exchange of live vision feeds between front-end agents dealing with an incident. This is believed to enhance the situational awareness at an individual level. It also improves the overall mission execution efficiency. One example is the use of distributed simultaneous localization and mapping (D-SLAM) by public safety personnel when going into an unknown field.
Such mission-critical applications are also time-critical by nature. In other words, they mandate ultra-low latencies. Zero-perceived latency (ZPL) is essential for humans to make sense of vision data. But even a more stringent constraint on latency is imposed by vision processing and motion planning deadlines. To that end, 5G is indeed very well-suited to address the aspirations of such mission-critical use cases.
2. Where is the Business Case?
The only foreseen hurdle before the adoption of 5G in public safety lies on a different continent! It is whether a mobile network operator (MNO) will have a sufficient business case to serve public safety and law enforcement sectors. This is simply because mission-critical operations are quite often conducted in hard-to-reach areas, remote locations, or even disaster-stuck areas.
Figuring out a viable business case under those conditions is going to be very tough. In the USA for example, it seemed like the administration decided to take a shortcut around this situation by actually allocating a USD 7B fund to build the “FirstNet” public safety network. Unfortunately, this is not expected to be the case elsewhere around the globe. As such, the potential of being able to set up 5G networks on the fly is going to be so appealing. What a better way to achieve that goal other than using flying base stations?
The concept of flying base stations is still nascent and may sound a bit too ambitious. However, work by Bucaille et al as early as 2013 has demonstrated the viability of using flying base stations for rapidly deploying tactical networks [1]. One can’t miss the pace at which the robotics industry is advancing. This will pave the way for using clusters of drone-mounted base stations to offer 5G services when and where needed the most.
We believe that the success of the concept of flying base stations shall undoubtedly override that of temporary mobile trailers. This is true for the obvious reasons that a “flying” base station enjoys better radio conditions and can actually better respond to traffic demands by adjusting its position more frequently. Furthermore, a quick window shopping exercise implies that the cost of a flying base station is in the range of one tenth of a mobile trailer. Thus, providing a further incentive for considering flying base stations.
3. Capacity Deficit
The concept of flying base stations has been addressed in literature mainly from a radio access perspective, i.e. drone placement and coverage optimization [2]. There is actually another pertinent technical challenge that needs to be tackled. Look no further than the backhaul interface between base stations. With the stringent latency objectives for the 5G networks, the latency budget for the backhaul network becomes extremely tight. It is going to be even tighter for a deployment scenario where drones are used as remote radio heads (RRH). Front-hauling in that case shall mandate even lower latency figures.
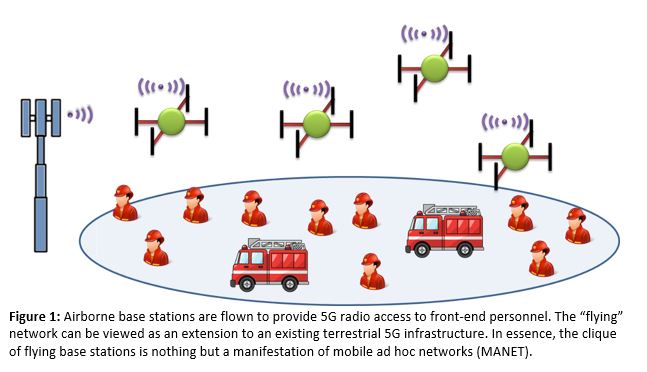
So what is the best strategy to build a low latency backhaul network? From a topological point of view, a clique of flying base stations is nothing but a mobile ad hoc network (MANET) as illustrated in Figure 1. Suddenly, a couple of decades’ worth of work on MANET becomes so relevant. However, this shouldn’t lead to the false impression that MANET technologies today are ready from a latency point of view.
One of the most notorious problems plaguing MANET is the routing overhead which grows almost exponentially with the number of nodes, traffic arrival rates, and degree of mobility. Constant mobility of base stations and consequently the time-varying topology of the backhaul network are the main problems here. The computation of optimal routing paths becomes quite a resource-consuming task. This has actually been coined as a “capacity deficit” problem since it leads to wasting network resources on routing and topology updates [3].
Looking at the status quo of MANET, there is another major shortfall. This is the long time typically required for network formation as well as for a node to join or leave the network. The join/leave duration is definitely not a secondary problem. This is true since drones have limited flight times. As such, drones with fresh battery reserves will have to frequently take over those with depleted batteries.
4. Autonomous Cooperative Routing
A very promising approach for low-latency MANET is autonomous cooperative routing (ACR). ACR was sparked by a couple of landmark research papers [4,5] and has been primarily geared towards defense and tactical applications. In a nutshell, ACR utilizes a many-to-many transmission paradigm. At any given hop, multiple nodes take on the responsibility of cooperatively forwarding the packet. They actually do so without reverting to any cross-coordination amongst themselves. Any node that determines itself to be eligible to route the packet ahead simply does so. This eliminates the overhead associated with neighbor discovery updates and routing table exchanges. In contrast, classical routing techniques are path-oriented therefore nodes need to consistently update their awareness of their neighborhoods so as to maintain routing paths current.
ACR noticeably outperforms conventional path-oriented routing in unicast and convergecast modes. Yet, it excels the most in the cases of multicast and broadcast. The average multicast/broadcast latency grows linearly in terms of the number of nodes in the case of ACR. In contrast, it grows exponentially in case of path-oriented routing. This may prove to be a critical piece of the value proposition of ACR. In essence, flying base stations can be viewed as a clique of aerial robotic agents that consistently need to exchange control data with each other. This is required so as to facilitate coordinated motion planning and other coordinated functions.
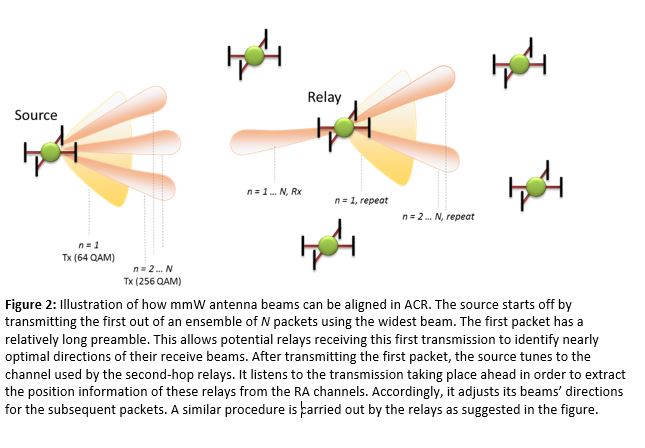
In principle, ACR utilizes a single channel and is operated in half-duplex mode. To that end, there is indeed quite some room for improvement by introducing full-duplex capability (out-of-band full-duplex, at least in the foreseen future). When operated in full-duplex mode, ACR can tap into the abundance of spectrum in higher bands such as 60 GHz. For instance, the intermediate relay in Figure 2 can be receiving at one frequency channel and simultaneously transmitting at another. As such, a given flow between two nodes may be composed of multiple concurrent full-duplex transmissions.
The introduction of full-duplex to ACR is not as straightforward as one may think. Before injecting an ensemble of N packets, the source needs to reserve a virtual forwarding corridor towards the packet destination [5]. However, this phase must be executed using in half-duplex mode and using only a single channel. It is actually during this reservation phase that relays at each hop can determine transmit and receive frequencies to be used when switching to the full-duplex mode for the actual data transmission phase.
5. Riding the Millimeter Wave
The need for ultra-low latency at the backhaul layer of flying base stations should not overshadow the need for accommodating high bandwidth. Hence, millimeter wave (mmW) bands make a very interesting proposition. To that end, beamforming is an essential element in mmW technology and thus has to be considered carefully in conjunction with ACR.
Generally speaking, there are two modes of beamforming. Multiple input multiple output (MIMO) mode in which multiple data stream are transmitted simultaneously. The other mode is beamsteering whereby the transmitter and receiver continuously taper their antenna arrays to produce aligned beams. The former mode, i.e. MIMO, requires the transmitter to perform precoding based on channel state information (CSI) feedback from the receiver. The luxury of receivers’ feedback however is not possible in the case of ACR whose main virtue is to minimize or even eliminate control transactions between wireless nodes. This immediately implies that only the beamsteering mode is feasible for ACR.
Nevertheless, ACR still needs to incorporate means for transmitters and receivers to align their beams without violating ACR’s fundamental design rules. One way to achieve that goal is via a set of information-bearing random access (RA) channels [6]. Those RA channels are an integral part of the frame’s preamble. They can be used by a cooperative transmitter to encode its relative position. Wireless nodes can start off with wide beams based on high-level position information as illustrated in Figure 2. Then they can work their way towards refining their beams by extracting position information from the RA channels as exemplified by Figure 2.
6. Operational and Regulatory Considerations
Mature operational models do not seem yet to exist with regards to the roll out of a network of flying base stations. A multitude of factors (which are often highly correlated) need to be considered when such models are developed and optimized. For example, the number of extra drones in stand-by mode on the ground depend on the maximum flight time of the drone and the charging time at the launch pad. The flight time is also highly dependent on the drone’s payload (the wireless equipment) whose size in return is function of the coverage footprint sought for the flying base station. Furthermore, in law enforcement applications the altitude of the drone becomes an important security issue. The higher the drone is, the less likely it can be hunted down by adversaries. This has to be added to the blend of aforementioned factors.
On the other hand, regulatory constraints that exist today have to be acknowledged. The foremost constraint relates to the restrictions on flying drones beyond the pilot’s line of sight, let alone the lack of regulations today in favor of autonomous drones. However, we sincerely believe that the market drive backed by rapid technological advancement are going to push for a comparably innovative regulatory framework, sooner or later. Not only could 5G development benefit from that, but it can actually be in the driving seat.
7. Summary
The vision for 5G is currently being developed to cover brand new grounds. Notions such as “tactile Internet” and the “Internet of Skills” have become cornerstones of what 5G is aspired to deliver. Not far away from those notions, 5G is also envisioned to support mission-critical applications for the public safety and law enforcement sectors.
The common element amongst all of these use cases is the need for ultra-low latency. Public safety and law enforcement operations however are often deployed in areas or scenarios where it does not make business sense to a MNO. To address such a challenge, there has to be a means by which 5G radio access networks can be set up on the fly when and where they are needed. What a better way to do it other than using flying base stations?
References:
- Bucaille, S. Héthuin, A. Munari, R. Hermenier, T. Rasheed and S. Allsopp, "Rapidly Deployable Network for Tactical Applications: Aerial Base Station with Opportunistic Links for Unattended and Temporary Events ABSOLUTE Example," MILCOM 2013 - 2013 IEEE Military Communications Conference, San Diego, CA, 2013, pp. 1116-1120.
- Mozaffari, W. Saad, M. Bennis and M. Debbah, "Drone Small Cells in the Clouds: Design, Deployment and Performance Analysis," 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, 2015, pp. 1-6.
- A. Abouzeid and N. Bisnik, "Geographic Protocol Information and Capacity Deficit in Mobile Wireless Ad Hoc Networks," in IEEE Transactions on Information Theory, vol. 57, no. 8, pp. 5133-5150, Aug. 2011.
- Blair, T. Brown, K. M. Chugg, T. R. Halford and M. Johnson, "Barrage relay networks for cooperative transport in tactical MANETs," MILCOM 2008 - 2008 IEEE Military Communications Conference, San Diego, CA, 2008, pp. 1-7.
- Sirkeci-Mergen and A. Scaglione, "Randomized Space-Time Coding for Distributed Cooperative Communication," in IEEE Transactions on Signal Processing, vol. 55, no. 10, pp. 5003-5017, Oct. 2007.
- Bader and M. S. Alouini, "Mobile Ad Hoc Networks in Bandwidth-Demanding Mission-Critical Applications: Practical Implementation Insights," in IEEE Access, vol. 5, no. , pp. 891-910, 2017.
 Ahmed Bader [M’10, SM’13] received his B.S. degree from the University of Jordan in 2003, his M.S. degree from The Ohio State University in 2006, and his Ph.D. degree from Telecom ParisTech, France, in 2013, all in electrical engineering. He has more than 14 years of experience in the wireless industry and has previously held positions at Emerson and Siemens. Since 2013, he has been with King Abdullah University of Science and Technology (KAUST) in Saudi Arabia where he is spearheading multiple applied research projects that have led to several patent-pending technologies. He is also a co-founder of Insyab Wireless (www.insyab.com), a Dubai-based company designing real-time connectivity solutions for unmanned systems. His research interests are mainly in the domain of large-scale low-latency wireless networks. He received the IEEE ComSoc Young Professionals Best Innovation Award in 2017 in recognition of his work.
Ahmed Bader [M’10, SM’13] received his B.S. degree from the University of Jordan in 2003, his M.S. degree from The Ohio State University in 2006, and his Ph.D. degree from Telecom ParisTech, France, in 2013, all in electrical engineering. He has more than 14 years of experience in the wireless industry and has previously held positions at Emerson and Siemens. Since 2013, he has been with King Abdullah University of Science and Technology (KAUST) in Saudi Arabia where he is spearheading multiple applied research projects that have led to several patent-pending technologies. He is also a co-founder of Insyab Wireless (www.insyab.com), a Dubai-based company designing real-time connectivity solutions for unmanned systems. His research interests are mainly in the domain of large-scale low-latency wireless networks. He received the IEEE ComSoc Young Professionals Best Innovation Award in 2017 in recognition of his work.
 Mohamed-Slim Alouini (S’94, M’98, SM’03, F’09) was born in Tunis, Tunisia. He received the Ph.D. degree in Electrical Engineering from the California Institute of Technology (Caltech), Pasadena, CA, USA, in 1998. He served as a faculty member in the University of Minnesota, Minneapolis, MN, USA, then in the Texas A&M University at Qatar, Education City, Doha, Qatar before joining King Abdullah University of Science and Technology (KAUST), Thuwal, Makkah Province, Saudi Arabia as a Professor of Electrical Engineering in 2009. His current research interests include the modeling, design, and performance analysis of wireless communication systems.
Mohamed-Slim Alouini (S’94, M’98, SM’03, F’09) was born in Tunis, Tunisia. He received the Ph.D. degree in Electrical Engineering from the California Institute of Technology (Caltech), Pasadena, CA, USA, in 1998. He served as a faculty member in the University of Minnesota, Minneapolis, MN, USA, then in the Texas A&M University at Qatar, Education City, Doha, Qatar before joining King Abdullah University of Science and Technology (KAUST), Thuwal, Makkah Province, Saudi Arabia as a Professor of Electrical Engineering in 2009. His current research interests include the modeling, design, and performance analysis of wireless communication systems.
Editor: Yunlong Cai
Subscribe to Tech Focus
Join our IEEE Future Networks Technical Community and receive IEEE Future NetworksTech Focus delivered to your email.
Article Contributions Welcome
Submit Manuscript via Track Chair
Author guidelines can be found here.
Other Future Networks Publications
IEEE Future Networks Tech Focus Editorial Board
Rod Waterhouse, Editor-in-Chief
Mithun Mukherjee, Managing Editor
Imran Shafique Ansari
Anwer Al-Dulaimi
Stefano Buzzi
Yunlong Cai
Zhi Ning Chen
Panagiotis Demestichas
Ashutosh Dutta
Yang Hao
Gerry Hayes
Chih-Lin I
James Irvine
Meng Lu
Amine Maaref
Thas Nirmalathas
Sen Wang
Shugong Xu
Haijun Zhang
Glaucio Haroldo Silva de Carvalho